Moteurs
Moteurs hydrauliques et pneumatiques
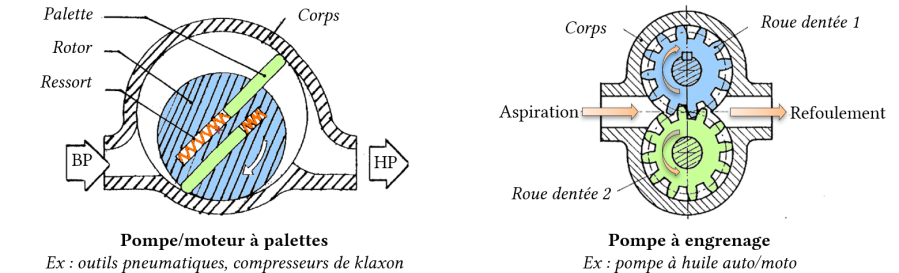
Ils sont utilisés afin de convertir une puissance fluidique (pneumatique ou hydraulique) en puissance mécanique de rotation. Tous les systèmes présentés ci-dessous sont presque tous réversibles (pas d'application connue du moteur à engrenage). On peut donc fournir une puissance fluidique pour la convertir en puissance mécanique (c'est alors un moteur), ou inversement fournir une puissance mécanique de rotation pour la convertir en puissance fluidique (compresseur ou pompe).

Moteurs électriques

Les moteurs électriques sont utilisés afin de convertir une puissance électrique en puissance mécanique de rotation. Ils sont tous composés d'un rotor (tournant) et d'un stator (fixe). |  |
Le moteur à courant continu
Le moteur à courant continu (MCC) est très utilisé dans les systèmes automatisés car sa commande est relativement simple. Comme son nom l'indique, il fonctionne à partir d'un courant continu. Le stator crée un champ magnétique fixe grâce à des bobinages ou à des aimants permanents. Le rotor constitué d'un bobinage est alimenté à partir des balais (charbons) qui frottent sur le collecteur. Selon le balai en contact avec un collecteur, la polarité dans la bobine s'inverse ce qui génère le mouvement de rotation du rotor. La vitesse de rotation dépend de la tension au bornes du moteur. |  |

Le moteur asynchrone
Le moteur asynchrone est le moteur le plus utilisé dans l'industrie car il est très robuste et permet de développer des puissances importantes (ex : machine outils, TGV, ascenseurs). Il fonctionne avec un courant alternatif (monophasé : un seule phase ou triphasé : 3 phases). Il est également constitué d'un stator (fixe) et d'un rotor (tournant). Contrairement au MCC, il n'y a pas de contact entre le stator et le rotor.
On crée un champ magnétique tournant dans le bobinage du stator à partir du courant alternatif disponible. La vitesse de rotation de ce champ tournant est appelée vitesse de synchronisme. Grâce au phénomène d'induction (détaillé en physique), le rotor va se mettre à tourner pour suivre le champ statorique. Le terme asynchrone vient du fait que le rotor tourne en pratique à une vitesse plus faible que la vitesse de synchronisme : on parle de glissement. La vitesse de synchronisme et la vitesse de rotation du rotor dépendent de la fréquence du signal d'alimentation. |  |

Le moteur synchrone
Assez similaire au moteur asynchrone que ce soit sur sa composition ou sur son principe de fonctionnement. La principale différence réside au niveau du rotor : le rotor d'un moteur synchrone est constitué d'aimants permanents ou d'électroaimants. Le champ magnétique du rotor n'est donc pas obtenu par induction et ce dernier peut donc suivre sans glissement le champ tournant du stator : la vitesse du rotor est alors proportionnelle à la fréquence du signal de commande (courant alternatif). Le moteur synchrone nécessite une commande complexe, ne serait-ce que pour permettre son démarrage.
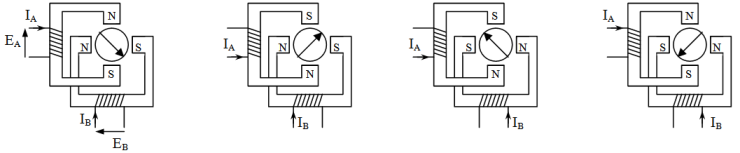
Le moteur pas à pas
Moteur de puissance faible (10W max), il permet de réaliser des rotations d'amplitude fixe (quart de tour dans l'exemple ci-dessous) de façon séquentielle. Le rotor est constitué d'un aimant emboîté dans deux couronnes dentées. Le stator est composé de plusieurs bobines qui sont alimentées à partir d'une commande tout ou rien en courant continu. Ce type de moteur fournit un couple de maintient à l'arrêt. |  |